 |
いよいよ形状ですね。え~と、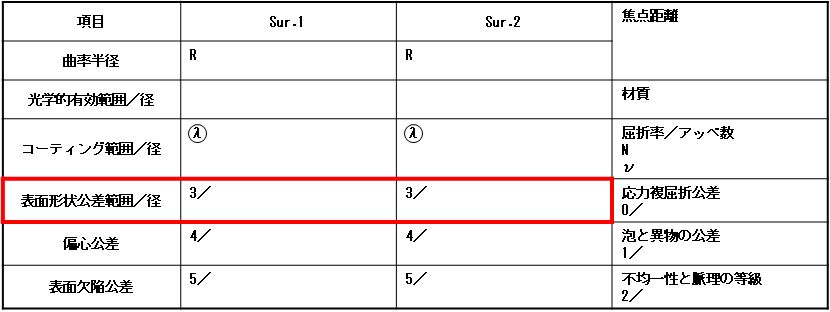 図1.要目表(再掲) これのコード番号は3だ。 | |
 | ここで対象としている表面形状は、基本的に回転対称形が前提となっている、ということをまず認識してください。そうでないと、話が繋がりません。 | |
| え??MFPとかLPに搭載されているレンズは、殆ど回転非対称形なんですけど?? | |
|
特に、直交する2つの方向で曲率半径の異なる形状のことをアナモフィックと言ったりしますが、そういう場合は注記でクドクドと説明するしかないのです。 ちなみに、回転対称形のレンズの場合、昔は"ニュートン"とか"アス"とか"クセ"とか言っていた公差と同じものを、この項目に記載することになります。 | |
| "アス"??"クセ"?? | |
| その前に"ニュートン"は大丈夫ですか?? | |
| リンゴの人です。 | |
| 大丈夫じゃなさそうですね…。まずは、そこから復習しましょうか。 | |
| お手柔らかに~。 | |
|
表面形状を評価する方法は、大きく2つあります。1つは触針式と言って、スタイラスで表面をこすりながら直接的に評価する方法です。 図2.Form Talysurf | |
| ん~。でも、この方法だとレンズ表面のすべてを評価するのは難しくないですか?? | |
| そうですね。Sagitta方向に何度も測定する必要がありますし、それでもデータが抜けてしまうのはやむを得ないでしょう。 | |
| Sagitta??それは何ですか?? | |
|
Sagitta面は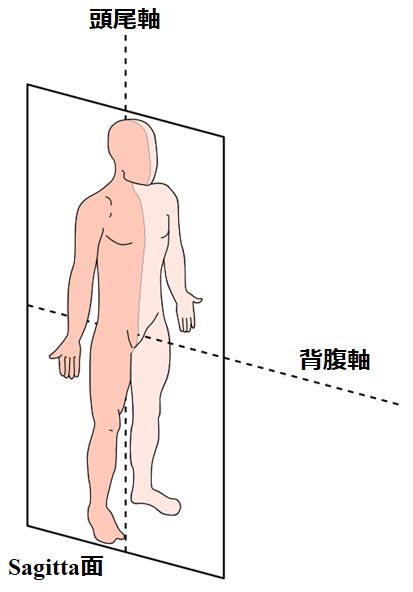 図3.Sagitta面 | |
| レンズだと?? | |
| 光軸を含む平面ということになりますね。球欠面と言ったりもします。従って、Sagitta方向というのは、レンズの頂点から放射状に伸びる方向という意味になります。 | |
| もう1つは?? | |
| 干渉縞を使う方法です。その中でも最も古典的で実用的なのがNewton環を使った方法です。 | |
| 何か思い出してきました。 | |
|
Newton環の実際の運用では、まず原器を用意し、それに被検物であるレンズを重ねます。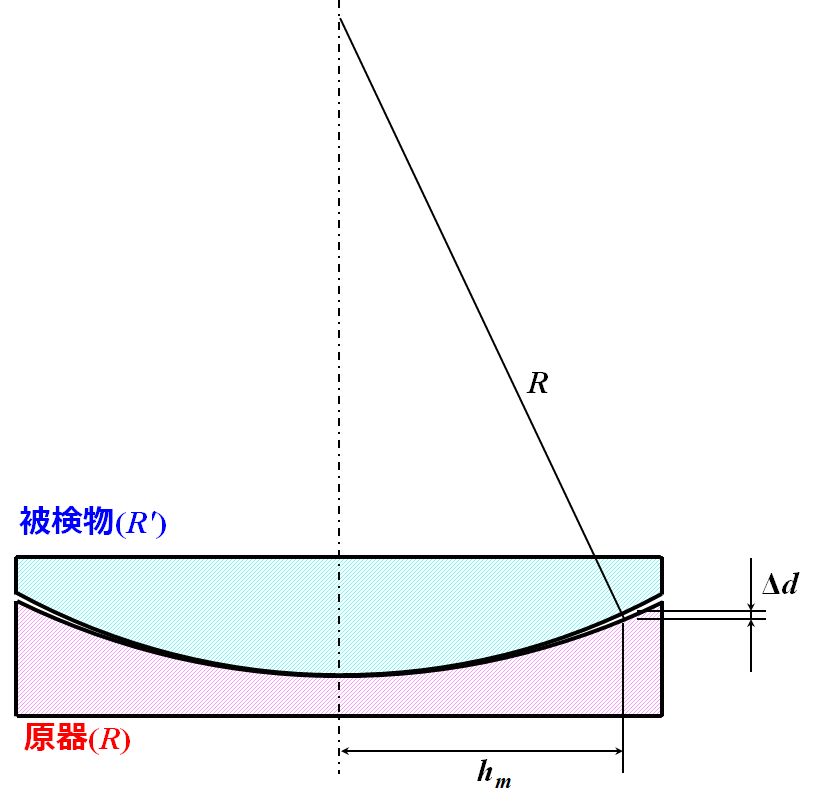 図4.Newton環の原理 しかし、加工されたレンズが寸法どおりの表面形状でできていない場合、原器との間に僅かな隙間が生じます。この隙間\(\Delta d\)は、 \[ \begin{align*} \Delta d &= \left( R' - \sqrt{ R'^2 - {h_m}^2} \right) - \left(R - \sqrt{ R^2 - {h_m}^2} \right) \\ &= \left\{ R' - R' \sqrt{ 1 - \left( \frac{h_m}{R'} \right)^2 } \right\} - \left\{ R - R \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \\ &\fallingdotseq \left\{ R' - R' \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} - \left\{ R - R \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \\ &= \left( R' - R \right) \left\{ 1- \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \\ &= \Delta R \left\{ 1- \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \\ \end{align*} \] と書けます。\(h_m\)はレンズ中心からSagitta方向の距離です。また、\(R'=R+\Delta R\)としました。 | |
| 途中に近似が入ってますけど?? | |
| これは\(\cfrac{\Delta R}{R}\)が小さいという仮定を置いています。 | |
|
光路長差は\(2\times \Delta d\)だけど、位相に変換するんでしたよね?? \[ \varepsilon = \frac{4\pi \Delta R}{\lambda} \left\{ 1- \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \] | |
|
ここで注意しなければならないのは、原器での反射は固定端の扱いになるので、位相が反転するということです。従って、縞の見える(弱め合う干渉)条件は、 \[ m = \frac{2 \Delta R}{\lambda} \left\{ 1- \sqrt{ 1 - \left( \frac{h_m}{R} \right)^2 } \right\} \] となります。\(h_m\)をレンズの光学的有効径(有効範囲)\(\phi\)に置き換えると、\(m\)がNewton環の縞数になりますね。 | |
| そうか。Newton環の縞数を数えれば、原器からのずれが分かるわけですね。 | |
|
もし、\(\cfrac{\phi}{2R}\)が小さいと、 \[ \sqrt{ 1 - \left( \frac{ \phi }{2R} \right)^2 } \sim 1 - \frac{1}{2} \left( \frac{ \phi }{2R} \right)^2 \] ですから、 \[ m = \frac{ \Delta R}{\lambda} \left( \frac{ \phi }{2R} \right)^2 \] となります。この縞数のことを"ニュートン"と呼んでいるわけです。干渉縞は、こんな感じで観測されます。 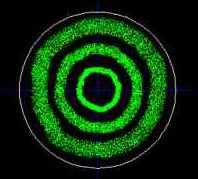 図5.ニュートン | |
| じゃぁ、"アス"というのは?? | |
| "アス"はastigmatismの略で非点収差のことです。つまり、直交するSagitta面内で焦点距離が異なるということです。 | |
| 回転対称形なのに、加工されたレンズはアナモフィックっぽくなっちゃったってことですね。 | |
|
直交するSagitta方向のそれぞれで"ニュートン"が規定されますが、その差を"アス"と呼ぶわけです。このときの干渉縞は次のように観察されます。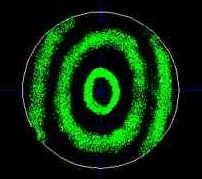 図6.アス | |
| 干渉縞が楕円っぽく見えますね。教授。このとき"ニュートン"は、2つあるうちのどちらで定義されるんですか?? | |
| 多い方で定義されます。具体的には、最大の縞数がある方向を決め、それと直交する縞数を数え、その差を"アス"と定義します。最大の縞数が"ニュートン"です。 | |
| 最後の"クセ"は?? | |
|
干渉縞の局所的な乱れのことです。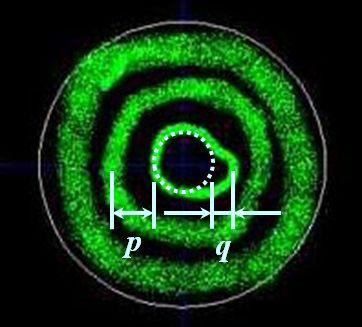 図7.クセ | |
| あ~。歪んでますね。教授。これも縞数で規定するんですか?? | |
| そうです。"クセ"については、干渉縞の間隔\(p\)に対して、縞の歪んだ部分の量\(q\)の比\(\cfrac{q}{p}\)で規定します。図7だと0.5程度ですね。 |
~新しい定義の導入~
| さて、以上は従来の定義です。これから新しい定義について説明していきましょう。 | |
| 大きく変わるんですか?? | |
|
そうですね。結構インパクトがあるかもしれません。まず、言葉が変わっているので、そこから押さえましょうか。 ・ニュートン ⇔ Sagitta偏差 ・ ア ス ⇔ irregularity ・ ク セ ⇔ 回転対称なirregularity | |
| ずいぶん、シャレた名称になりましたね…。 | |
| ISOがベースになってますからね。 | |
| 定義はどうなっているんですか?? | |
|
新しい表面形状公差には、基本的に「加工された曲面は、設計で指示された曲面に加工誤差が載ったもの」という考え方が導入されています。つまり、 \[ g\left(r \,,\ \theta\right)=f(r)+\delta _0 \left(r \,,\ \theta\right) \] ということです。 | |
| 加工された曲面が\(g\)、設計で指示された曲面が\(f\)、加工誤差が\(δ_0\)ですね。 | |
|
\(δ_0\)は全表面(形状)偏差関数と呼びますが、この\(δ_0\)を分解していくんです。まず、\(\delta_0 \left(r,\theta\right)\)に最もフィットする球面を\(s\left(r\right)\)とすると、 \[ \delta_0 \left(r \,,\ \theta\right)=s\left(r\right)+\delta_1 \left(r \,,\ \theta\right) \] と書けます。この\(s\)を縞数で表記したものがSagitta偏差ですね。 | |
| ん??最もフィットするってことは、最小二乗法を採用するということですか?? | |
| そうです。 | |
| そうすると、旧来の"ニュートン"とは違いますね?? | |
| そのとおりです。"ニュートン"は最大縞数で定義していましたが、Sagitta偏差は、寧ろ全体の平均縞数というイメージになりますね。 | |
| \(\delta_1\)は?? | |
| 残りの成分ですが、irregularity関数という名前がつけられています。このPV値を縞数で表記したものがirregularityとなります。 | |
| そうすると、やっぱり旧来の"アス"とは違いますね。 | |
|
そうですね。"アス"は直交するSagitta方向の縞数の差で定義していましたが、irregularityは、いろいろなSagitta方向における縞数の偏差というイメージになりますね。 更に、\(\delta_1\left(r\,,\ \theta\right)\)に最もフィットする回転対称非球面を\(a\left(r\right)\)とすると、 \[ \delta_1 \left(r \,,\ \theta\right)=a\left(r\right)+\delta_2 \left(r \,,\ \theta\right) \] と書けます。この\(a\)のPV値を縞数で表記したものが回転対称なirregularityです。 | |
| \(\delta_2\)は?? | |
|
これは、レンズ面形状の高周波成分のようなものになりますが、ここまでくるとRMS(二乗平均平方根)で処理するのが普通です。そのときrms回転非対称なirregularityと言って、RMSaと書きます。RMSaは次の式で与えられます。 \[ {\rm RMSa} = \sqrt{ \frac{ \displaystyle \iint_S \left| \delta _2 (r \,,\ \theta) \right| ^2 dS }{ \displaystyle \iint_S dS } } \] \(S\)は光学的有効径(有効範囲)のエリアを意味します。 | |
| そのとき??もしかして、他のときがあるってことですか?? | |
| 鋭いですね。実はRMSには他の定義の方法があります。1つは、\(\delta_0\)をRMSで代表させてしまう方法です。 | |
| ずいぶん、大雑把ですね…。 | |
| これを全rmsと呼び、RMStと書きます。 | |
| ということは、\(\delta_1\)をRMSで代表させる方法もありそうですね。 | |
| 正解です。これをrms irregularityと呼び、RMSiと書きます。 | |
|
ということは、整理すると、表面形状公差の与え方は、次の3種類があるわけですね。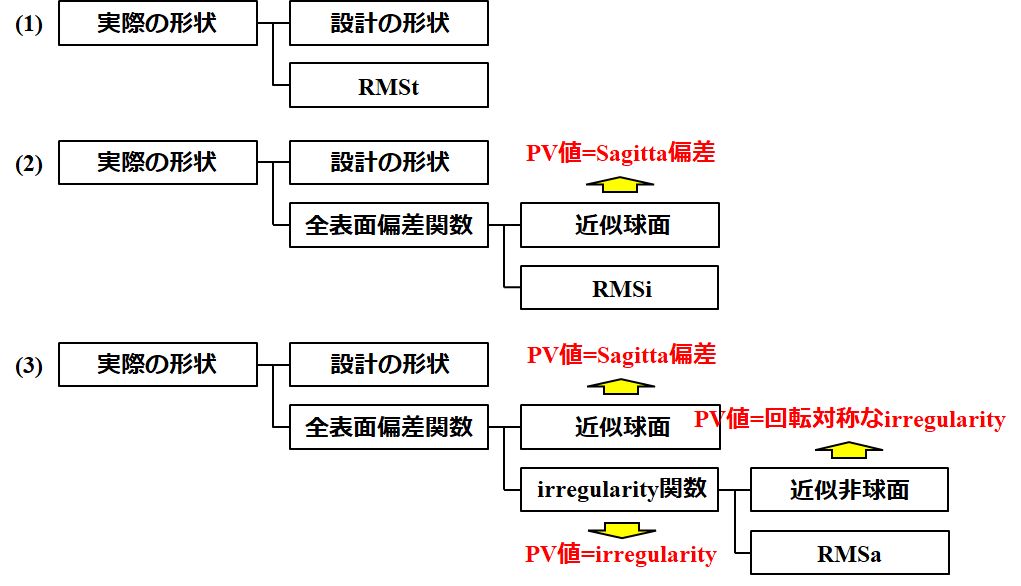 図8.表面形状公差の与え方 | |
| そうですね。その理解で問題ありません。 |
~要目表の書き方~
| で、要目表には何を書けばいいんですか?? | |
|
記載項目の順番を示すと、 3 / Sagitta偏差 (irregularity / 回転対称なirregularity) RMS ; 測定波長 光学的有効径(有効範囲) となります。ただ、図8に示してくれたように、表面形状公差の与え方にはバリエーションがありますからね。そもそも曲率半径に寸法公差が入っている場合、Sagitta偏差は不要でしょう??そのときは、 3 / ― (irregularity / 回転対称なirregularity) RMS ; 測定波長 光学的有効径(有効範囲) と書きます。 | |
| Sagitta偏差は、記載するとしたら最大許容値(縞数)ですか?? | |
| そうです。irregularity、回転対称なirregularityも最大許容値(縞数)を記載します。 | |
| RMSは?? | |
|
RMSは、RMSt、RMSi、RMSaの3種類ありますから、まずそれを記載して最大許容値(縞数)を書くわけですが、その場合は例えば、 RMSt < 0.05 というように不等号で押さえる書き方にします。 | |
| 測定波長は?? | |
|
e線だったら、 \(\lambda\)=546.07nm と書きます。 | |
|
う~ん。そうすると、Sagitta誤差が3本で、irregularityが1本で、回転対称なirregularityが0.5本で、RMSaが0.05本で、測定波長がe線で、光学的有効径が\(\phi\)30だったら、 3 / 3 (1/0.5) RMSa<0.05 ; \(\lambda\)=546.07nm \(\phi\)30 ですか…。 | |
| そうですね。 | |
| 情報量が多いですね~。教授。RMStのときってSagitta偏差もirregularityも回転対称なirregularityも不要ですけど、その場合はどう書くんですか?? | |
|
3 / ― RMSt<0.07 ; \(\lambda\)=546.07nm \(\phi\)30 のようになります。 | |
| じゃぁ、RMSiのときってirregularityも回転対称なirregularityも不要ですけど、その場合はどう書くんですか?? | |
|
3 / 3 (―) RMSi<0.03 ; \(\lambda\)=546.07nm \(\phi\)30 のようになります。 | |
| ん~と…。回転対称なirregularityだけが不要な場合はどう書くんですか?? | |
|
3 / 3 (1) RMSa<0.05 ; \(\lambda\)=546.07nm \(\phi\)30 のようになります。 | |
| そのとき、RMSが不要だったら?? | |
|
3 / 3 (1) ; \(\lambda\)=546.07nm \(\phi\)30 のようになります。 | |
| 2種類のRMSが併記されることってありますかね?? | |
| そりゃ、あるでしょう。 | |
| そのときはどう記載するんですか?? | |
|
そのときは、2つのRMSを;で区切ります。 3 / ― RMSt<0.07 ; RMSa<0.05 ; \(\lambda\)=546.07nm \(\phi\)30 こんな感じですね。 |
~収差との関係~
| こういう表記方法にしているのは、何か理由があるんですか?? | |
| この考え方にすると、収差との関連性が掴みやすいんです。 | |
|
例の、Seidel収差とかいう、アレですか?? Philipp Ludwig von Seidel(1821~1896) | |
|
そうです。そうですが、Seidel収差の考え方に踏み込むと大変なので、アウトラインだけ説明します。 まず、設計で指示された曲面を考えますが、図9のような半径\(R\)の円弧を考えましょう。 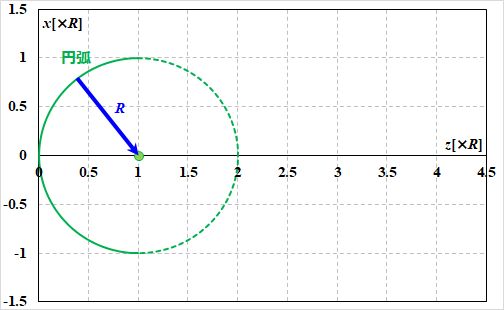 図9.円弧 この円弧は、 \[ R^2=\left(z-R\right)^2+x^2 \] と書けます。これを次のように変形します。 \[ R^2=\left(z-R\right)^2+x^2 \\ \quad \Leftrightarrow \left(z-R\right)^2=R^2-x^2 \\ \quad \Rightarrow z = R - \sqrt{R^2 - x^2} \] この円弧をz軸に回転させると、設計で指示された曲面になるので、 \[ f\left(r\right) = R - \sqrt{R^2 - r^2} \] です。 | |
| レンズ設計でよく見る式ですね。 | |
|
これに対して、加工された曲面は、 \[ g\left(r \,,\ \theta \right) = f\left(r\right) + A \cdot r^2 + B \cdot r^4 + C \cdot r^6 + \cdots + \delta_2 \left( r \,,\ \theta \right) \] と書けます。 | |
|
つまり、 \[ \delta_0 \left(r \,,\ \theta \right) \equiv A \cdot r^2 + B \cdot r^4 + C \cdot r^6 + \cdots + \delta_2 \left( r \,,\ \theta \right) \] ですね。 | |
|
このうち、 \[ s\left(r\right) \equiv A \cdot r^2 \] \[ a\left(r\right) \equiv B \cdot r^4 + C \cdot r^6 + D \cdot r^8 + \cdots \] です。図8と対応させると、図10のようになりますね。 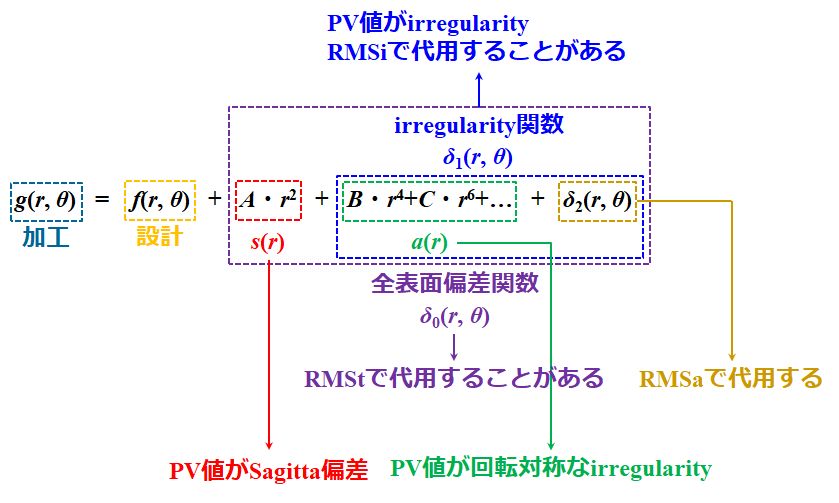 図10.対応関係 | |
| \(s\left(r\right)\)は球面ですか?? | |
| いえ。放物面です。しかし、放物面は、球面に対して非常によい近似を与えるんですよ。 | |
| そうすると、\(A\)から曲率半径に変換できる?? | |
|
できます。図11を見てください。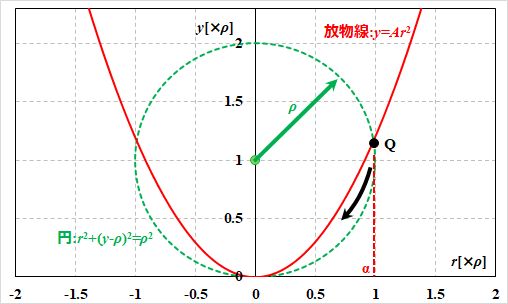 図11.放物線と円の交点 原点を頂点とする放物線は\(y=Ar^2\)(\(A>0\))と書くことができます。 一方、原点を通り、半径\(\rho\)の円は\(r^2+\left(y-\rho\right)^2=\rho^2\)です。この2つは原点以外の交点を持ってますが、そのうちの1つをQとし、\(r\)座標を\(\alpha\)(\(\alpha \ne 0\))としましょう。このとき\(\alpha\)は、 \[ r ^2 + ( Ar^2 - \rho ) ^2 =\rho^2 \] の解の1つになっています。 | |
| 円の式の\(y\)に、放物線の式を代入したわけですね。 | |
|
そうすると、 \[ \alpha^2 + \left( A \alpha^2 - \rho \right)^2 =\rho^2 \\ \quad \Leftrightarrow \alpha^2 + A^2 \alpha^4 -2 A \alpha^2 \rho=0 \\ \quad \Leftrightarrow A^2 \alpha^2 + \left(1 -2 A \rho \right)=0 \\ \quad \Leftrightarrow \rho = \frac{A^2 \alpha ^2 + 1}{ 2 A} \\ \] ここで、点Qが原点に近づく(\(\alpha \rightarrow 0\))と、この円は放物面の頂点における曲率半径になりますから、 \[ \lim_{\alpha \to 0} \rho = \lim_{\alpha \to 0} \left( \frac{A^2 \alpha ^2 + 1}{ 2 A} \right)= \frac{1}{2A} \] これが変換公式です。 | |
| それで、収差との関連は?? | |
| まず\(s\left(r\right)\)は、このように係数\(A\)から曲率半径に変換できるので、近軸領域のパワー変動を示していると理解できます。つまり、デフォーカスです。 | |
| ふむふむ。 | |
| また、回転対称成分である\(s\left(r\right)+a\left(r\right)\)は、レンズ面の球面収差を示していると考えられます。 | |
| なるほど。 | |
|
そして、残った\(\delta_2\left(r \,,\ \theta\right)\)が回転非対称な成分になります。 \(a\left(r\right)+\delta_2\left(r \,,\ \theta\right)\)が\(\delta_1\left(r \,,\ \theta\right)\)というirregularity関数を与えますが、これは、旧来の"アス"と"クセ"の複合したものと考えられます。irregularityは"アス"を拡張したもので、すべてのSagitta方向に関する干渉縞偏差という意味でしたよね??ですから、\(\delta_1\left(r \,,\ \theta \right)\)のPV値がirregularityとして定義されるわけです。つまり、拡張された非点収差という意味になります。 | |
| そうすると、\(a\left(r\right)\)のPV値である回転対称なirregularityって、狭い意味の"クセ"ってことになりますよね?? | |
| そうですね。回転対称成分のみしか考慮されてませんからね。ですから、旧来の"ニュートン"、"アス"、"クセ"と緩い対応は可能でも、厳密にはまったく違うものと捉えた方がよいと思います。 | |
| 教授。今回のレクチャーは、これまでのような蘊蓄が全然なくて、凄くつまらなかったです。 | |
| はい。多分、最後まで読んでくれた人はあまりいないと思います。 | |
| こういう、つまらない内容でも興味を掻き立てるような講座ができるように、腕を上げてください。 | |
| …。 |
| 前頁へ | 戻る | 次頁へ |